Pen Thief Robot
GitHub Back to Homepage
Overview
Overview
This project combines computer vision, robotics, and sensor integration to create a system capable of detecting, aligning, and interacting with objects in a 3D environment. Utilizing Intel RealSense cameras for depth and RGB data, the system implements color-based masking, adaptive thresholding, and contour detection to identify objects of interest. The 3D coordinates of these objects are calculated from pixel data, enabling precise spatial localization. A robotic arm, controlled through the Interbotix Manipulator library, is programmed to execute various motions such as reaching, grasping, and positional adjustments.
Hardware
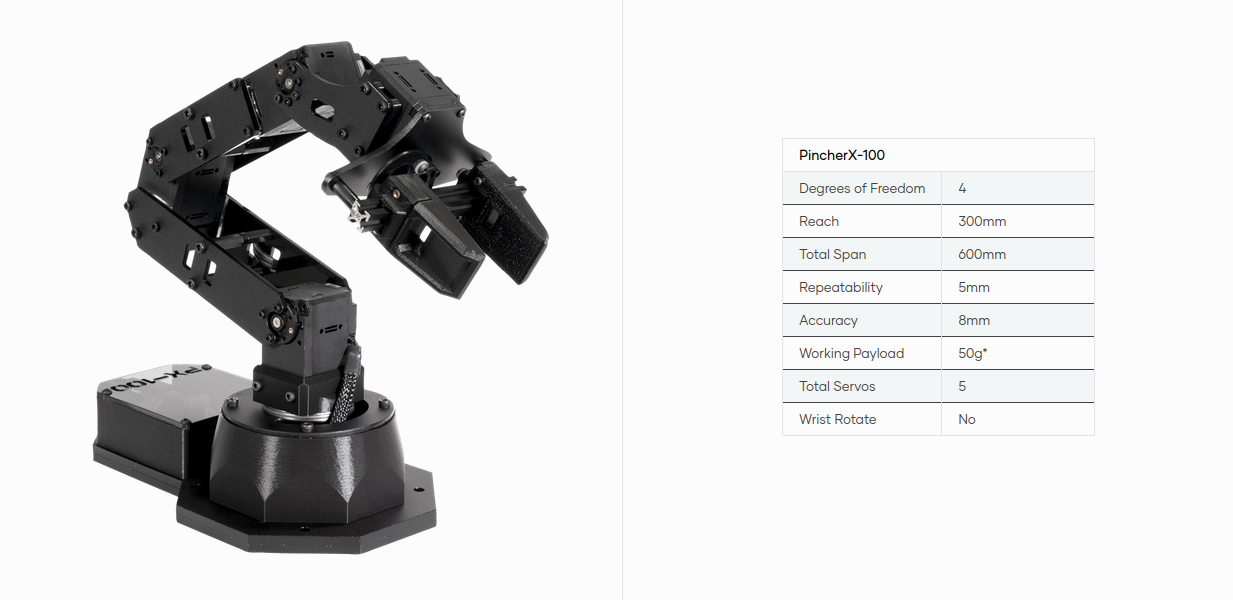
Interbotix PincherX-100 Arm

RealSense D455 Depth Camera
The PincherX-100 robot arm is a compact, versatile robotic manipulator designed for precision tasks, featuring four degrees of freedom and a gripper capable of executing intricate pick-and-place operations. In this project, the arm is utilized for object manipulation, leveraging its accuracy and ease of programming through the Interbotix Manipulator library. Complementing this is the Intel RealSense D455 depth camera, which provides high-resolution depth and RGB data for 3D perception. With its extended range and precise depth sensing, the D455 enables accurate object detection and spatial localization, forming the backbone of the vision system that guides the PincherX-100 in real-world interaction scenarios.
Pen Detection
Pen Detection using OpenCV
The system utilizes OpenCV to process live video input from the RealSense D455 depth camera. By converting the image to the HSV color space, specific color ranges for the pen are isolated using a mask, allowing for robust color-based segmentation. Contour detection is then applied to identify the pen's shape, enabling precise localization within the frame. Once the contour is detected, an average of the contour points is taken to get the center of the pen, which is represented with a red dot in OpenCV.
Converting 2D Points to 3D Space
After detecting the pen's contour in the 2D image frame, the centroid of the contour is computed to represent the pen's location in pixel coordinates (u, v). The depth value corresponding to this pixel is retrieved from the depth image, which provides the distance of the pen from the camera in meters. These values are then passed through the camera's intrinsic parameters to transform the 2D pixel coordinates and depth into real-world 3D coordinates (x, y, z) in the camera's coordinate system. These 3D coordinates are subsequently transformed into the robot's reference frame, enabling the PincherX-100 arm to accurately interact with the pen in physical space.
Controlling the Arm
Once the 3D space representation of the pen is determined, the PincherX-100 robot arm is controlled using the InterbotixManipulatorXS API
to interact with the pen. The arm can be directed to specific positions in the 3D workspace by setting the end-effector's pose through
the set_ee_pose_components method, which takes the calculated (x, y, z) coordinates. For fine-grained control, individual joints can be
adjusted using the set_single_joint_position method, while multiple joints can be coordinated via the set_joint_positions method.
The robot also features predefined poses, such as home and sleep positions, for initialization and standby states. Additional commands allow
the gripper to grasp or release objects and enable movement in specific directions like forward, backward, up, or down. This modular
control framework ensures precise and flexible manipulation of the arm based on real-world spatial data.